ROS2 Tutorial: Step-by-Step Xacro Guide for effective Robot Modeling (Part 2)
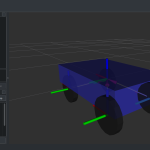
Been a while since I posted the first part in this ROS2 tutorial series, so let's start with a quick recap. In the last blog, we created a simple robotic…
0 Comments
October 12, 2025